1#include <Servo.h>
2
3Servo myServo;
4
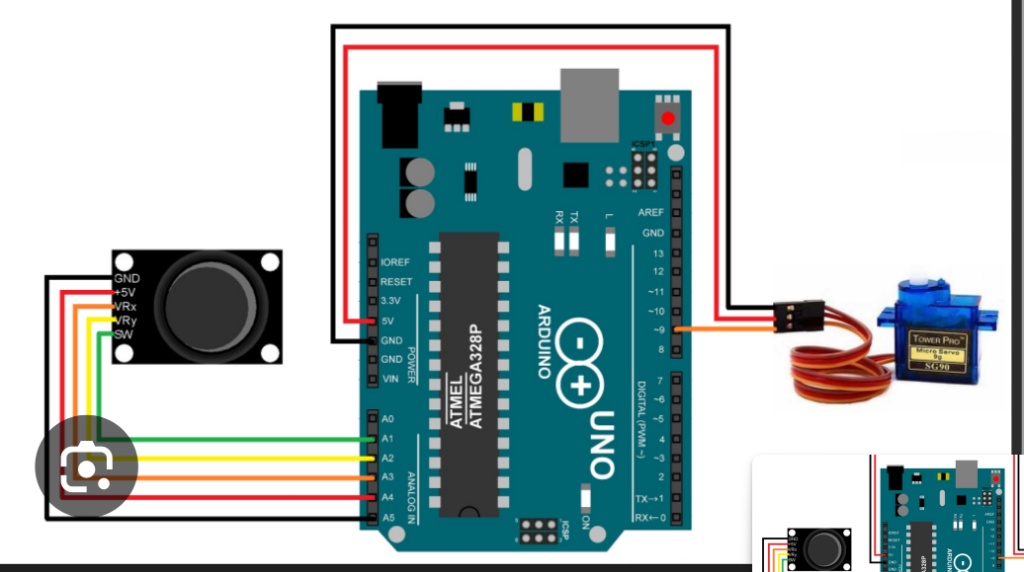
5int joyX = A0; // VRx pin
6int xValue;
7
8int servoPin = 9;
9
10void setup() {
11 myServo.attach(servoPin);
12 Serial.begin(9600);
13}
14
15void loop() {
16 xValue = analogRead(joyX); // Read joystick X value
17
18 // Map joystick (0–1023) to servo angle (0–180)
19 int angle = map(xValue, 0, 1023, 0, 180);
20
21 myServo.write(angle);
22
23 // Debug (optional)
24 Serial.print("Joystick: ");
25 Serial.print(xValue);
26 Serial.print(" | Angle: ");
27 Serial.println(angle);
28
29 delay(15); // smooth movement
30}