Back to Hub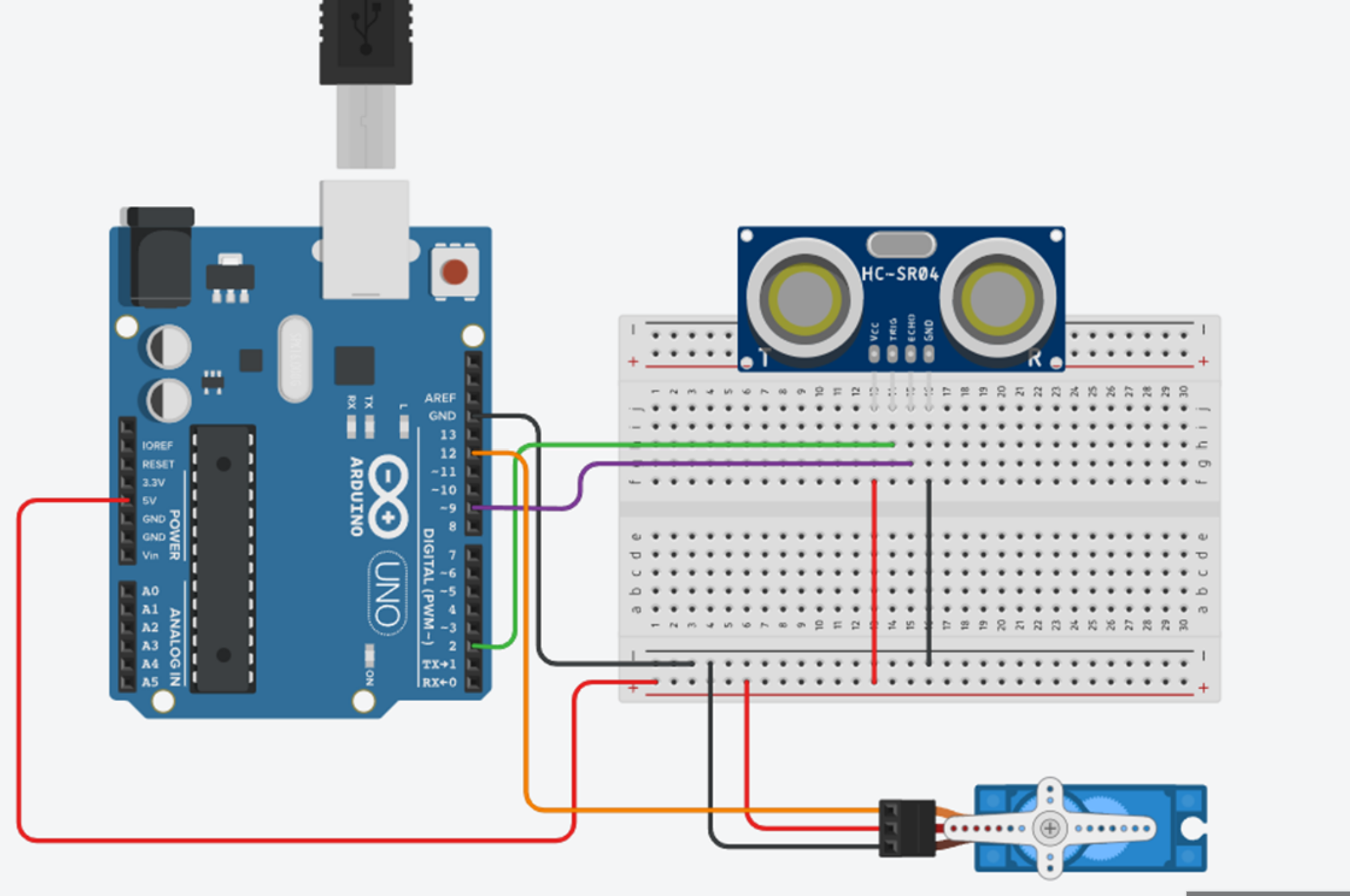
Radar system Arduino
March 24, 2026 Watch Tutorial
Wiring Schematic
Hardware Required
- Arduino BoardBuy on Amazon
Source Code
Arduino / C++
1#include <Servo.h>
2
3Servo myServo;
4
5const int trigPin = 7;
6const int echoPin = 6;
7
8int angle = 0;
9int direction = 1; // 1 = forward, -1 = backward
10
11unsigned long lastServoMove = 0;
12unsigned long lastSensorRead = 0;
13
14int distance = 0;
15
16void setup() {
17 Serial.begin(9600);
18
19 pinMode(trigPin, OUTPUT);
20 pinMode(echoPin, INPUT);
21
22 myServo.attach(9);
23}
24
25void loop() {
26
27 // 🔁 Servo moves continuously (every 20ms)
28 if (millis() - lastServoMove >= 20) {
29 lastServoMove = millis();
30
31 angle += direction;
32
33 if (angle >= 180) direction = -1;
34 if (angle <= 0) direction = 1;
35
36 myServo.write(angle);
37 }
38
39 // 📡 Ultrasonic reads independently (every 50ms)
40 if (millis() - lastSensorRead >= 50) {
41 lastSensorRead = millis();
42
43 distance = getDistance();
44
45 Serial.print(angle);
46 Serial.print(",");
47 Serial.print(distance);
48 Serial.print(".");
49 }
50}
51
52// 📏 Distance function (stable)
53int getDistance() {
54 digitalWrite(trigPin, LOW);
55 delayMicroseconds(2);
56
57 digitalWrite(trigPin, HIGH);
58 delayMicroseconds(10);
59 digitalWrite(trigPin, LOW);
60
61 long duration = pulseIn(echoPin, HIGH, 30000); // timeout added
62
63 if (duration == 0) return 0;
64
65 int dist = duration * 0.034 / 2;
66 return dist;
67}
68
69
70
71
72
73// Prcoessing Code:-
74
75import processing.serial.*;
76import java.awt.event.KeyEvent;
77import java.io.IOException;
78
79Serial myPort;
80
81String distance="";
82String data="";
83String noObject;
84String angle="";
85
86float pixsDistance;
87int iAngle=0, iDistance=0;
88int index1=0;
89
90PFont orcFont;
91
92void setup() {
93 size(1280,720); // ✅ FIXED
94 smooth();
95
96 println(Serial.list());
97 myPort = new Serial(this,"COM3",9600); // change if needed
98 myPort.bufferUntil('.');
99}
100
101void draw() {
102
103 // fade effect (better radar look)
104 fill(0,20);
105 noStroke();
106 rect(0, 0, width, height);
107
108 fill(98,245,31);
109
110 drawRadar();
111 drawLine();
112 drawObject();
113 drawText();
114}
115
116// ✅ FIXED + STABLE SERIAL
117void serialEvent (Serial myPort) {
118 data = myPort.readStringUntil('.');
119
120 if (data != null) {
121 data = trim(data);
122
123 if (data.contains(",")) {
124 index1 = data.indexOf(',');
125
126 try {
127 iAngle = int(data.substring(0, index1));
128 iDistance = int(data.substring(index1+1));
129 }
130 catch(Exception e) {
131 // ignore bad data
132 }
133 }
134 }
135}
136
137void drawRadar() {
138 pushMatrix();
139 translate(width/2,height-height*0.074);
140 noFill();
141 strokeWeight(2);
142 stroke(98,245,31);
143
144 arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
145 arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
146 arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
147 arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
148
149 line(-width/2,0,width/2,0);
150 line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
151 line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
152 line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
153 line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
154 line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
155
156 popMatrix();
157}
158
159// 🔴 OBJECT LINE (ONLY WITHIN 10cm)
160void drawObject() {
161 pushMatrix();
162 translate(width/2,height-height*0.074);
163 strokeWeight(9);
164
165 pixsDistance = iDistance*((height-height*0.1666)*0.025);
166
167 if(iDistance > 0 && iDistance <= 10){
168 stroke(255,0,0); // RED
169 line(pixsDistance*cos(radians(iAngle)),
170 -pixsDistance*sin(radians(iAngle)),
171 (width-width*0.505)*cos(radians(iAngle)),
172 -(width-width*0.505)*sin(radians(iAngle)));
173 }
174
175 popMatrix();
176}
177
178// 🔴 SCANNING LINE COLOR CHANGE
179void drawLine() {
180 pushMatrix();
181 strokeWeight(9);
182
183 if(iDistance > 0 && iDistance <= 10){
184 stroke(255,0,0); // RED when detected
185 } else {
186 stroke(30,250,60); // GREEN normal
187 }
188
189 translate(width/2,height-height*0.074);
190 line(0,0,
191 (height-height*0.12)*cos(radians(iAngle)),
192 -(height-height*0.12)*sin(radians(iAngle)));
193
194 popMatrix();
195}
196
197void drawText() {
198 pushMatrix();
199
200 if(iDistance>40) {
201 noObject = "Out of Range";
202 } else {
203 noObject = "In Range";
204 }
205
206 fill(0,0,0);
207 noStroke();
208 rect(0, height-height*0.0648, width, height);
209
210 fill(98,245,31);
211 textSize(25);
212
213 text("10cm",width-width*0.3854,height-height*0.0833);
214 text("20cm",width-width*0.281,height-height*0.0833);
215 text("30cm",width-width*0.177,height-height*0.0833);
216 text("40cm",width-width*0.0729,height-height*0.0833);
217
218 textSize(40);
219 text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
220 text("Distance: " + iDistance +" cm", width-width*0.26, height-height*0.0277);
221
222 popMatrix();
223}