Back to Hub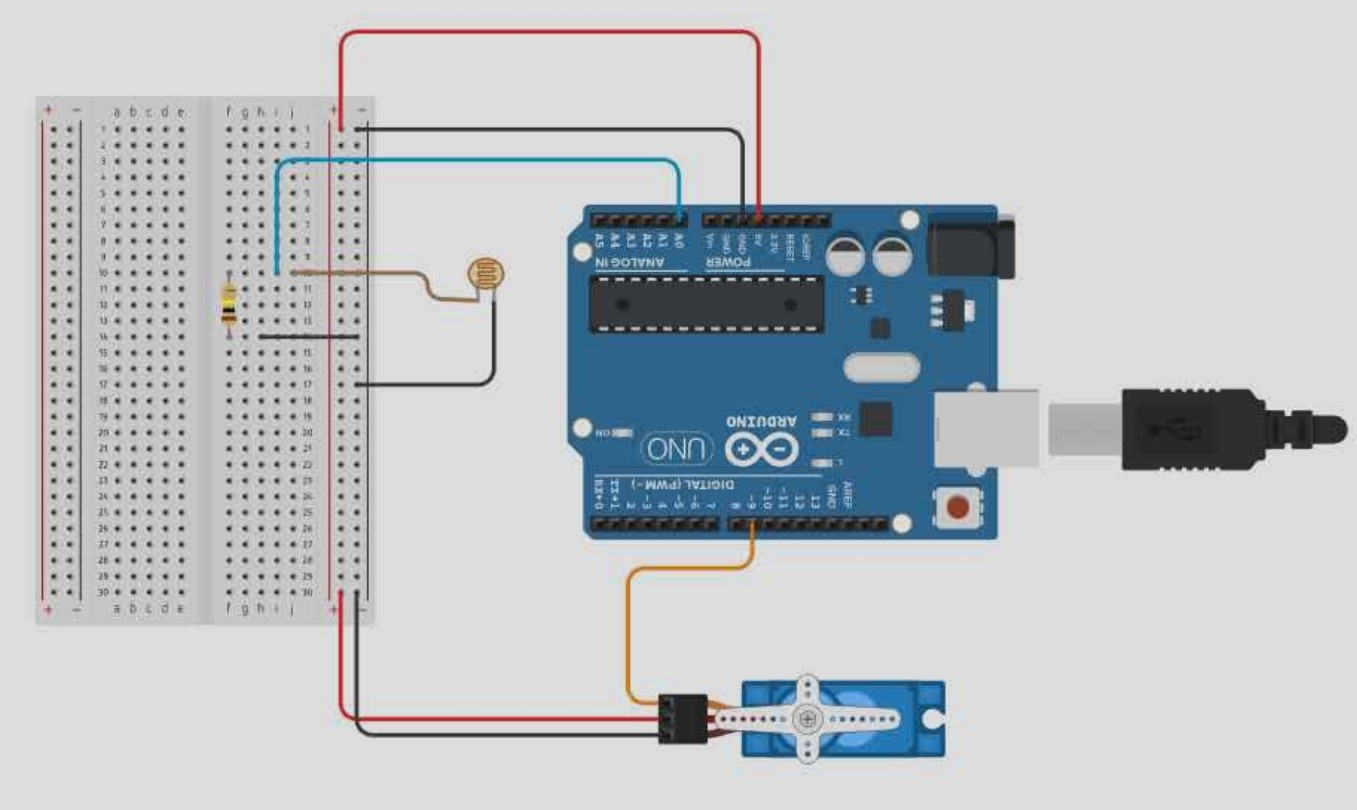
Arduino dinasour hack game
March 26, 2026 Watch Tutorial
Wiring Schematic
Hardware Required
- Arduino BoardBuy on Amazon
Source Code
Arduino / C++
1#include <Servo.h>
2
3Servo dinoServo; // Create servo object to control the motor
4
5const int ldrPin = A0; // The analog pin the LDR is connected to
6const int servoPin = 9; // The PWM pin the servo is connected to
7
8// --- CALIBRATION VARIABLES ---
9int lightThreshold = 670;
10
11// TWEAK 1: Start closer to the key (55 instead of 30) for a faster physical punch
12int restAngle = 55;
13int pressAngle = 75;
14
15void setup() {
16 // TWEAK 2: Cranked baud rate to 115200 so your prints don't lag the motor
17 Serial.begin(115200);
18 dinoServo.attach(servoPin);
19
20 // Start the servo in the hovering position
21 dinoServo.write(restAngle);
22
23 Serial.println("Dino Hacker Online...");
24}
25
26void loop() {
27 // 1. Read the light level from the screen
28 int currentLight = analogRead(ldrPin);
29
30 // Print the value so you can see it on your computer screen
31 Serial.print("Light Level: ");
32 Serial.println(currentLight);
33
34 // 2. Check if a cactus is passing under the sensor (screen gets dark)
35 if (currentLight < lightThreshold) {
36 Serial.println("CACTUS DETECTED! JUMP!");
37
38 // Smash the spacebar
39 dinoServo.write(pressAngle);
40
41 // Wait just long enough for the key press to register, and the jump to happen
42 delay(50);
43
44 // Reset back to hovering position
45 dinoServo.write(restAngle);
46
47 // Wait a little bit so it doesn't double-jump on the same cactus
48 delay(35);
49 }
50
51 // TWEAK 3: Reduced this from 10 to 1 for ultra-fast screen scanning
52 delay(1);
53}