Back to Hub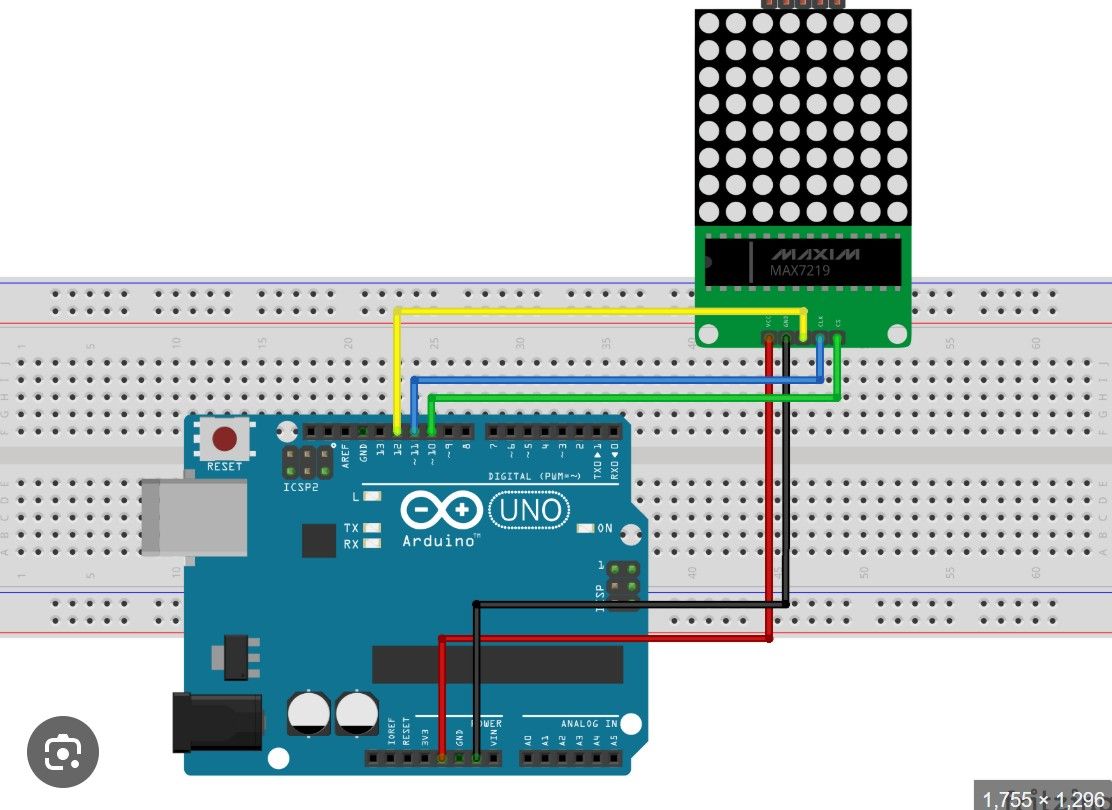
Finger controlled dot matrix
March 29, 2026 Watch Tutorial
Wiring Schematic
Hardware Required
- Arduino BoardBuy on Amazon
Source Code
Arduino / C++
1#include <LedControl.h>
2
3// DIN, CLK, CS, only ONE dot matrix
4LedControl lc = LedControl(11, 13, 10, 1);
5
6byte numbers[10][8] = {
7 {B00111100,B01100110,B01100110,B01100110,B01100110,B01100110,B00111100,B00000000}, //0
8 {B00011000,B00111000,B00011000,B00011000,B00011000,B00011000,B00111100,B00000000}, //1
9 {B00111100,B01100110,B00000110,B00001100,B00110000,B01100000,B01111110,B00000000}, //2
10 {B00111100,B01100110,B00000110,B00011100,B00000110,B01100110,B00111100,B00000000}, //3
11 {B00001100,B00011100,B00101100,B01001100,B01111110,B00001100,B00001100,B00000000}, //4
12 {B01111110,B01100000,B01111100,B00000110,B00000110,B01100110,B00111100,B00000000}, //5
13 {B00111100,B01100000,B01111100,B01100110,B01100110,B01100110,B00111100,B00000000}, //6
14 {B01111110,B00000110,B00001100,B00011000,B00110000,B00110000,B00110000,B00000000}, //7
15 {B00111100,B01100110,B01100110,B00111100,B01100110,B01100110,B00111100,B00000000}, //8
16 {B00111100,B01100110,B01100110,B00111110,B00000110,B00001100,B00111000,B00000000} //9
17};
18
19void showNumber(int n) {
20 lc.clearDisplay(0);
21 for (int i = 0; i < 8; i++) {
22 lc.setRow(0, i, numbers[n][i]);
23 }
24}
25
26void setup() {
27 Serial.begin(9600);
28
29 lc.shutdown(0, false);
30 lc.setIntensity(0, 3); // 🔆 LOW BRIGHTNESS (0–15)
31 lc.clearDisplay(0);
32
33 // startup test
34 showNumber(8);
35}
36
37void loop() {
38 if (Serial.available()) {
39 char ch = Serial.read();
40
41 if (ch >= '0' && ch <= '9') {
42 showNumber(ch - '0');
43 }
44 }
45}
46
47
48
49
50
51
52
53// Python code
54
55
56
57import cv2
58import mediapipe as mp
59import serial
60import time
61
62# Arduino COM port (change it)
63arduino = serial.Serial('COM3', 9600)
64time.sleep(2)
65
66mp_hands = mp.solutions.hands
67hands = mp_hands.Hands()
68mp_draw = mp.solutions.drawing_utils
69
70cap = cv2.VideoCapture(0)
71
72def count_fingers(hand_landmarks):
73 tips = [4, 8, 12, 16, 20]
74 fingers = []
75
76 # Thumb
77 if hand_landmarks.landmark[tips[0]].x < hand_landmarks.landmark[tips[0] - 1].x:
78 fingers.append(1)
79 else:
80 fingers.append(0)
81
82 # Other fingers
83 for i in range(1, 5):
84 if hand_landmarks.landmark[tips[i]].y < hand_landmarks.landmark[tips[i] - 2].y:
85 fingers.append(1)
86 else:
87 fingers.append(0)
88
89 return sum(fingers)
90
91while True:
92 success, img = cap.read()
93 imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
94 results = hands.process(imgRGB)
95
96 if results.multi_hand_landmarks:
97 for handLms in results.multi_hand_landmarks:
98 count = count_fingers(handLms)
99 print("Fingers:", count)
100
101 # Send to Arduino
102 arduino.write(str(count).encode())
103
104 mp_draw.draw_landmarks(img, handLms, mp_hands.HAND_CONNECTIONS)
105
106 cv2.imshow("Hand Tracking", img)
107
108 if cv2.waitKey(1) & 0xFF == 27:
109 break
110
111cap.release()
112cv2.destroyAllWindows()