Back to Hub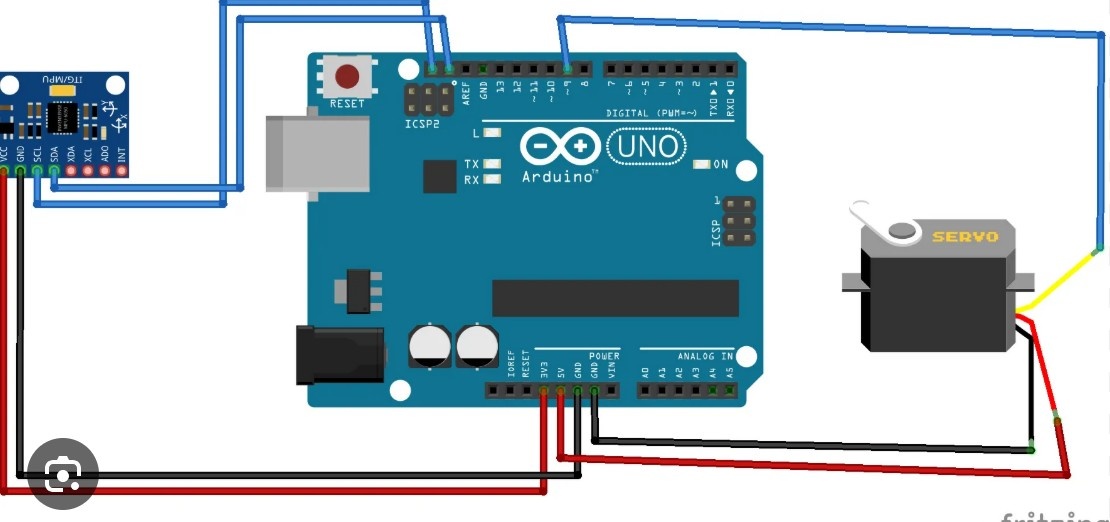
mpu6050 controlled Servo motor
April 8, 2026 Watch Tutorial
Wiring Schematic
Hardware Required
- Arduino BoardBuy on Amazon
Source Code
Arduino / C++
1#include <Wire.h>
2#include <Servo.h>
3
4const int MPU_addr = 0x68; // Standard I2C address of the MPU-6050
5int16_t AcX, AcY, AcZ; // Variables to store raw accelerometer data
6
7Servo myServo;
8
9void setup() {
10 Serial.begin(115200);
11
12 // Attach the servo to Pin 9 on the Mega
13 myServo.attach(9);
14
15 // Initialize I2C communication
16 Wire.begin();
17
18 // Wake up the MPU-6050
19 Wire.beginTransmission(MPU_addr);
20 Wire.write(0x6B); // Target the Power Management register
21 Wire.write(0); // Write a 0 to wake it up
22 Wire.endTransmission(true);
23
24 Serial.println("MPU6050 is awake! Ready for REVERSED front/back movement.");
25
26 // Start the servo in the middle, safe position (90 degrees)
27 myServo.write(90);
28 delay(1000);
29}
30
31void loop() {
32 // Start reading from the MPU6050
33 Wire.beginTransmission(MPU_addr);
34 Wire.write(0x3B);
35 Wire.endTransmission(false);
36
37 // Request 6 registers total
38 Wire.requestFrom(MPU_addr, 6, true);
39
40 // Read the raw data
41 AcX = Wire.read() << 8 | Wire.read();
42 AcY = Wire.read() << 8 | Wire.read(); // Y-axis (Front-to-back)
43 AcZ = Wire.read() << 8 | Wire.read();
44
45 // Constrain raw Y so it doesn't glitch
46 int constrainedY = constrain(AcY, -17000, 17000);
47
48 // REVERSED LOGIC: Map the Y-axis to 165 -> 15 instead of 15 -> 165
49 int servoAngle = map(constrainedY, -17000, 17000, 165, 15);
50
51 // Move the servo safely
52 myServo.write(servoAngle);
53
54 // Print values to the Serial Monitor
55 Serial.print("Raw Y: ");
56 Serial.print(AcY);
57 Serial.print(" | Reversed Servo Angle: ");
58 Serial.println(servoAngle);
59
60 // Small delay for smooth movement
61 delay(50);
62}